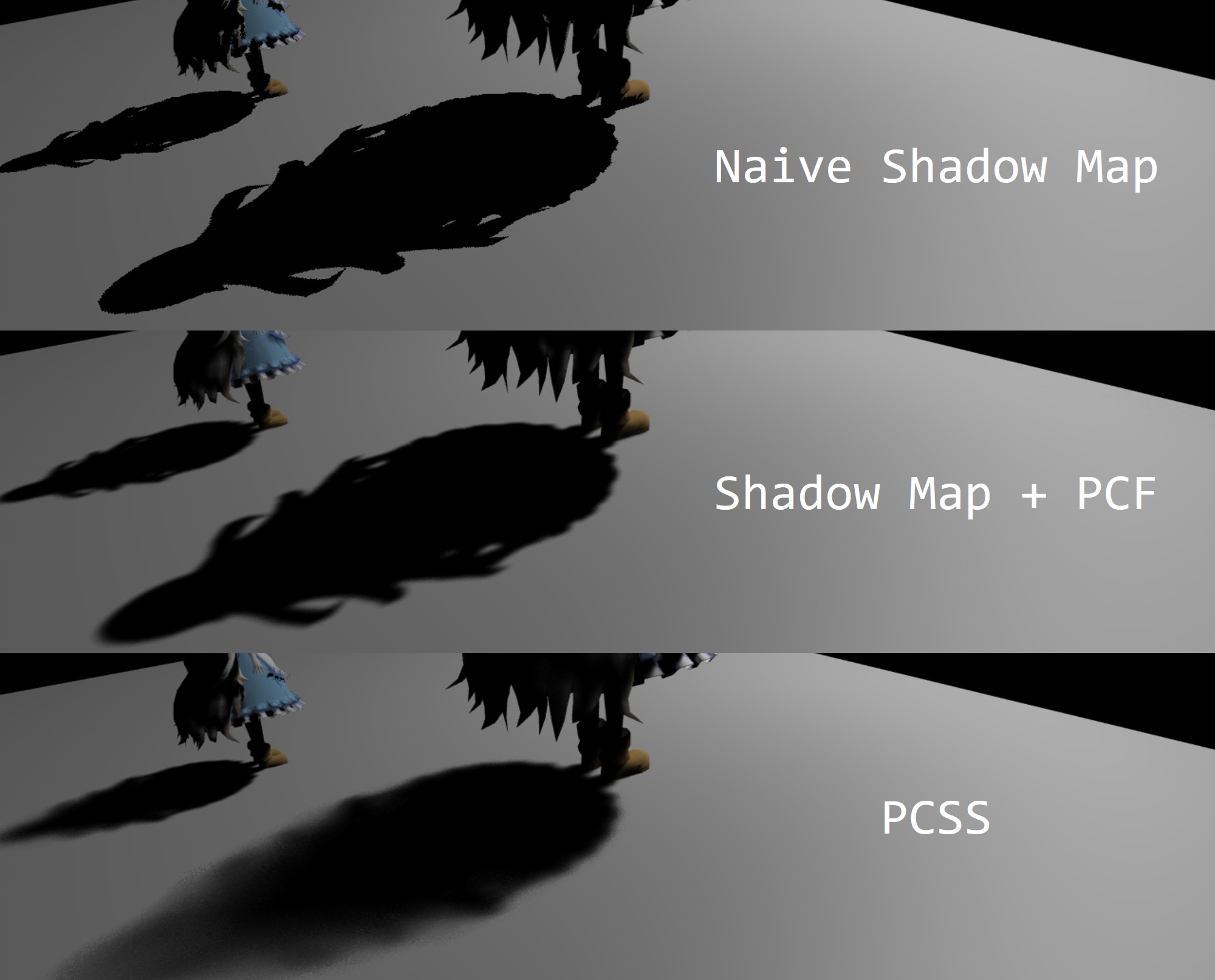
本文是闫令琪老师GAMES202高质量实时渲染课程的学习笔记和总结,本次主题是该课程的最后一部分内容——实时光线追踪,这方面的内容主要是关于低采样率下实时光线追踪的时间域降噪算法和空间域降噪算法。

本文是闫令琪老师GAMES202高质量实时渲染课程的学习笔记和总结,本次主题是该课程的最后一部分内容——实时光线追踪,这方面的内容主要是关于低采样率下实时光线追踪的时间域降噪算法和空间域降噪算法。
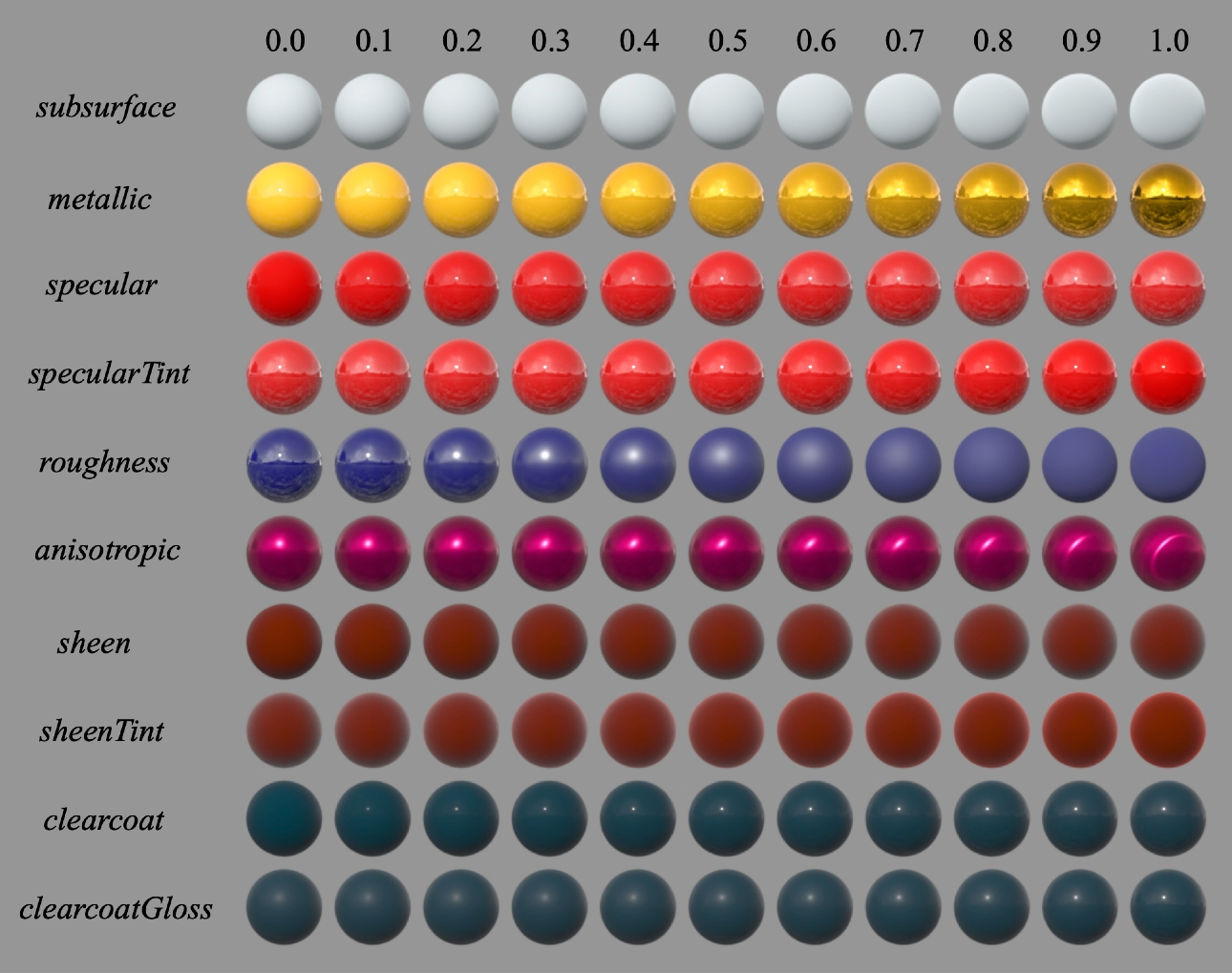
本文是闫令琪老师GAMES202高质量实时渲染课程的学习笔记和总结,这一节的主题为基于物理的BRDF材质模型,涉及的内容有基于微表面理论的BRDF材质模型、迪士尼原则的BRDF材质模型、Kulla-Conty近似以及基于LTC的实时面光源光照着色算法。
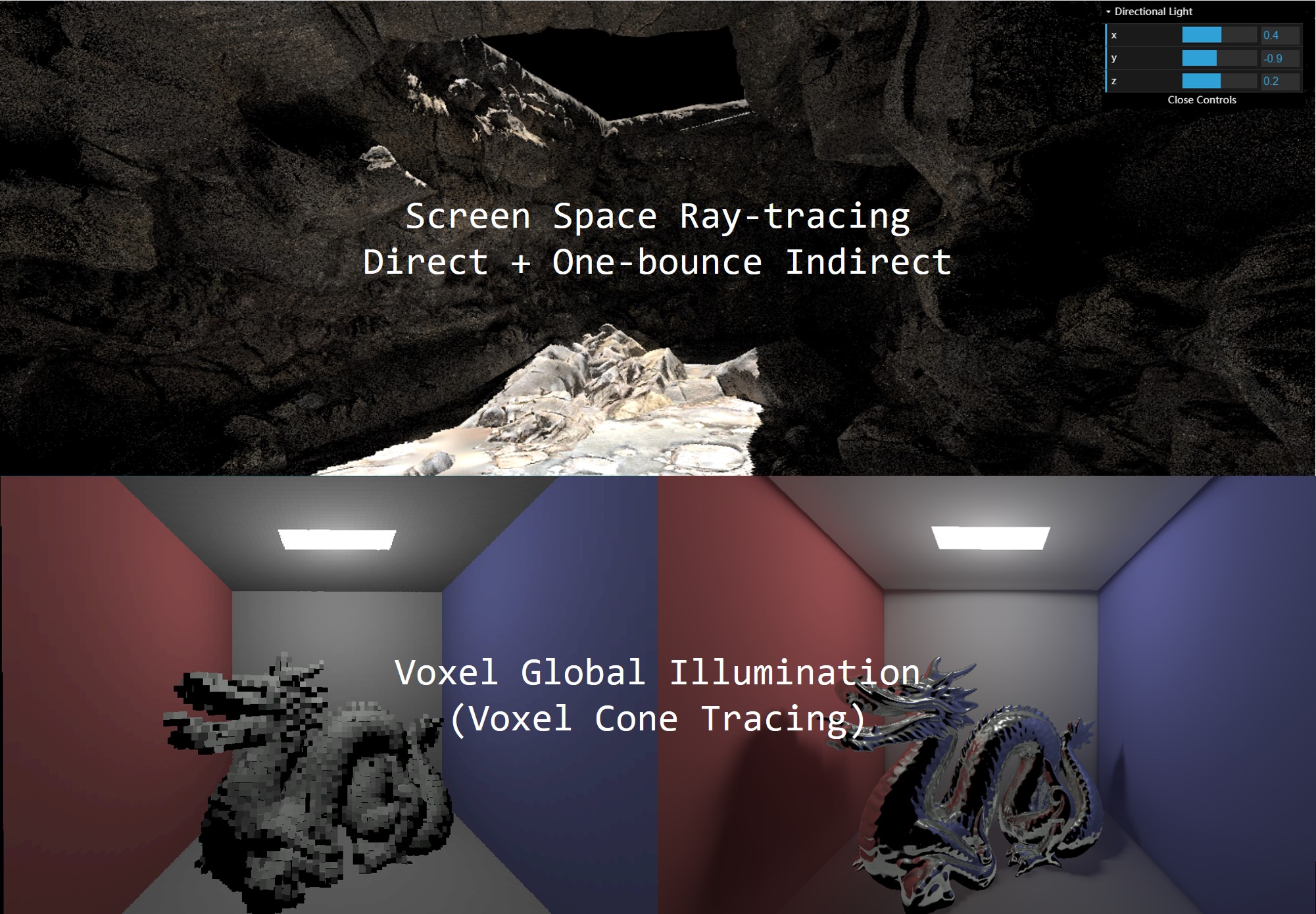
本文是闫令琪老师GAMES202高质量实时渲染课程的学习笔记和总结,这一节的主题为实时全局光照,涉及的技术有RSM(Reflective Shadow Maps)、LPV(Light Propagation Volumes)、VXGI(Voxel Global Illumination)、SSAO(Screen Space Ambient Occlusion)、SSDO(Screen Space Directional Occlusion)以及SSR(Screen Space Reflection/Ray-tracing)。
本文是闫令琪老师GAMES202高质量实时渲染课程的学习笔记和总结,这一节的主题为高质量实时环境光照,内容分为IBL(Imaged Based Lighting)和PRT(Precomputed Radiance Transfer)。

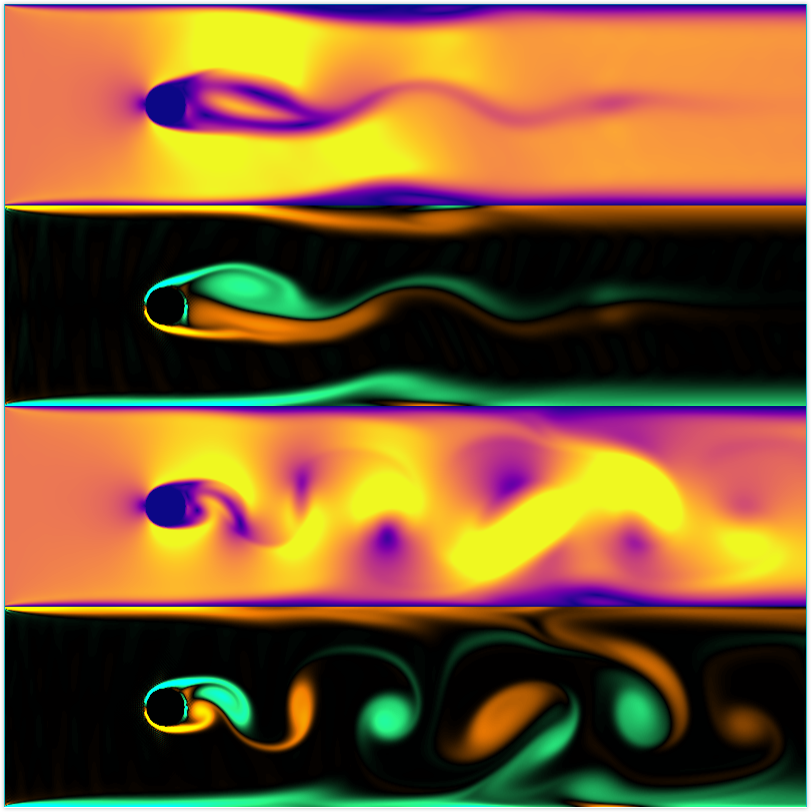
相对于基于N-S流体方程的模拟方法,栅格Boltzmann流体模拟方法(Lattice Boltzmann Method,简称LBM)是一种截然不同的流体模拟算法,表面上看起来跟Navier-Stokes没什么太大的关联,但依旧能够实现非常逼真的流体动画(特别是细粒度流体)。LBM容易理解,实现起来也不难。
在不考虑空气介质的散射效应时,我们假定光线在真空中传播,故光线的辐射率在传播过程不会发生变化。但真实地球世界却并非真空,大气散射、烟雾散射等丁达尔效应现象对渲染结果至关重要,这类光学效果涉及到散射介质,光线在此类介质中被吸收、散射,最终到达人眼的辐射率与未考虑介质散射的有非常明显的不同。
1 / 5